

Last year I learned about the Stochastic Neural Analog Reinforcement Calculator (SNARC). As the first artificial neural network machine ever built, it seemed like a lost artifact in the history of AI because not much information about it was available. So earlier this year, I reached out to Margaret Minsky, Marvin Minsky's daughter, to learn more and she replied. Since then she has been a great supporter in helping me uncover more details.
One of the current unresolved mysteries of the SNARC is what the whole machine looked like. There are no known photographs of the whole assembly and the 40 SNARC cells are no longer around, save for one which is what my model is based on.
What we do know
It repurposed a gyropilot — the system used for auto-piloting a B52 — to actuate a chain that interfaced with the custom-designed electromechanical clutches attached to each potentiometer. All of this was built into racks. And because of the short mean-time-to-failure for vacuum tubes, we can presume that debugging was probably a design goal (we can see a hint of that with the way that the each SNARC cell was plugged into the system using a banana plug plate).
I hope to continue to work on this by building a v2 of the SNARC, one that includes a representation of the 40 SNARC cells and their actuation process. For now, I'll just post some of the iterative builds I made during the process.
Special thanks to Margaret Minsky for working with me as I learned as much as I could about the SNARC. My representation doesn't do justice to the original but hopefully it conveys some of the key concepts that went into the design of the original.
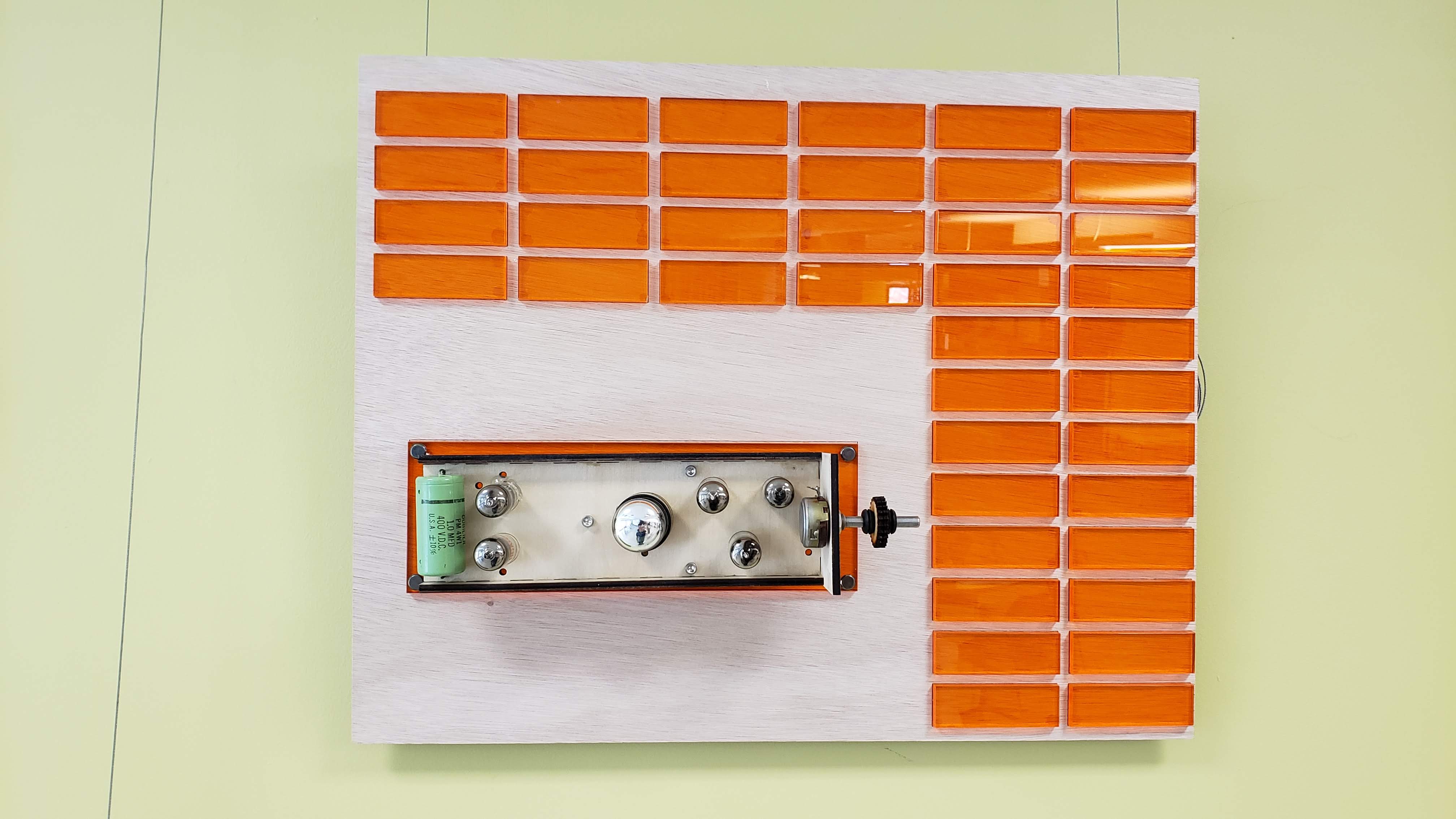 SNARC Model
SNARC Model
First build
 SNARC - Teardown style
SNARC - Teardown style
Laser cutting frames
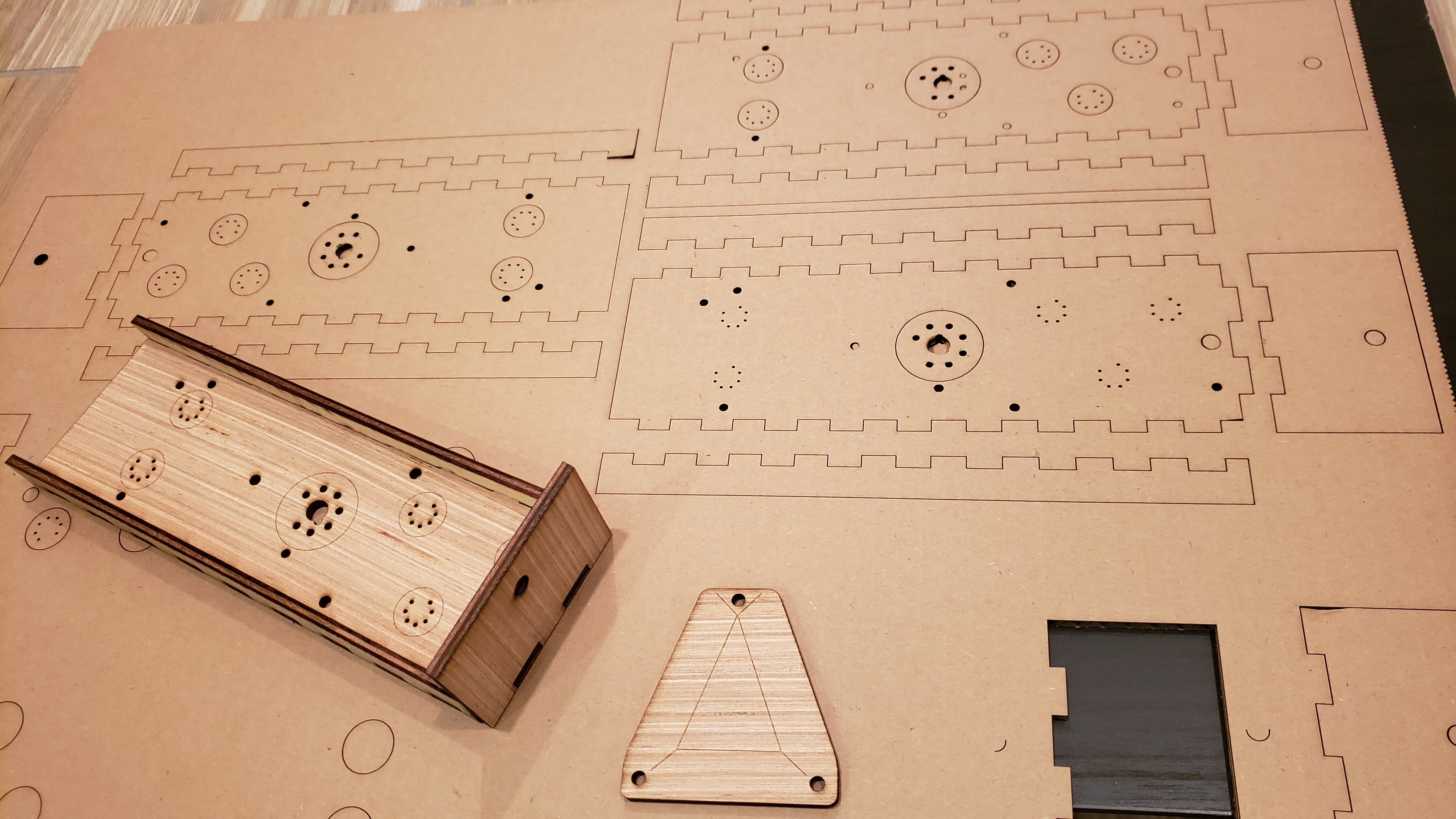 SNARC - Cardboard to plywood frames
SNARC - Cardboard to plywood frames
Layout with chain
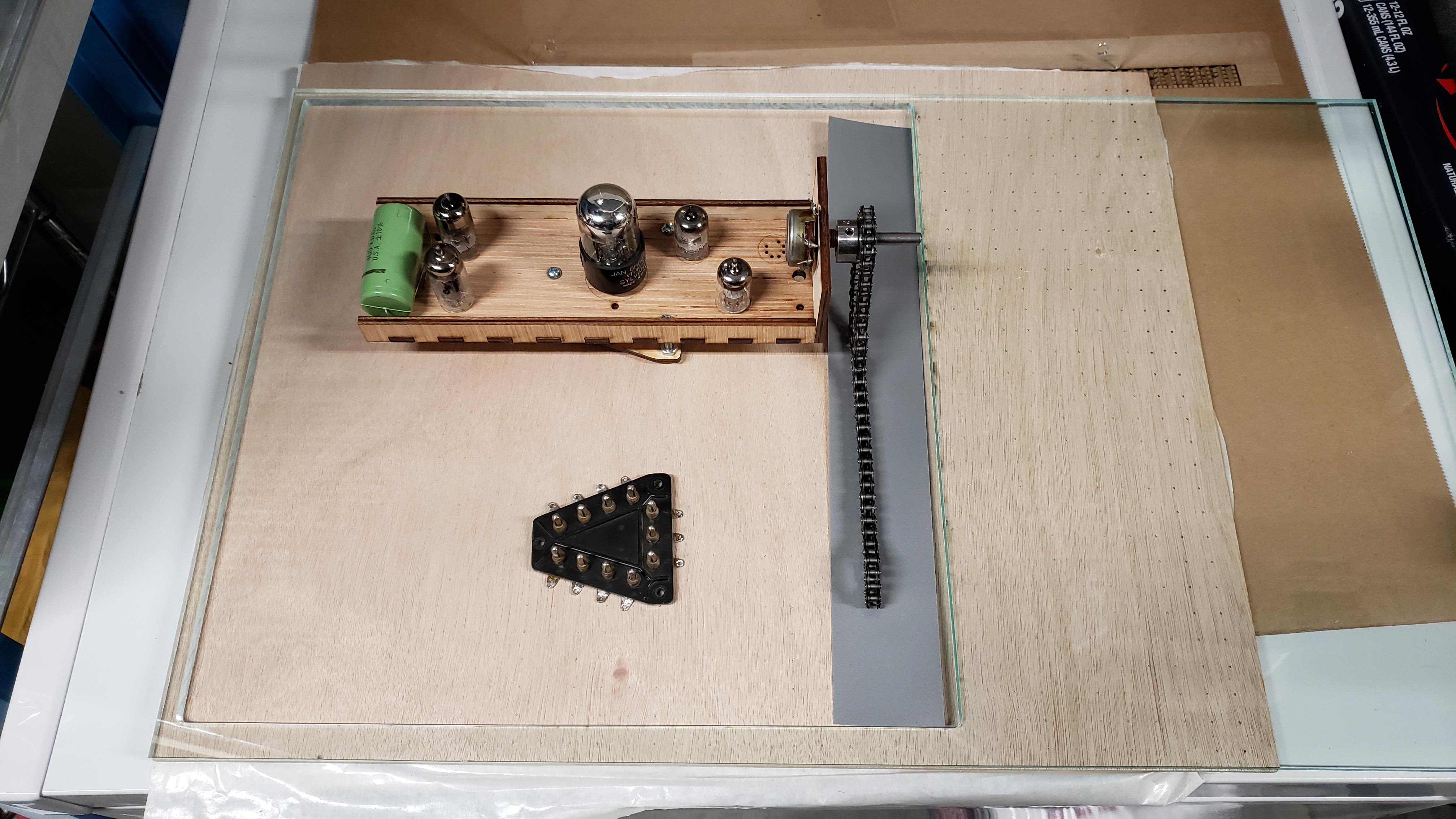 SNARC - Layout 1
SNARC - Layout 1
SNARC Exhibit Label
Stochastic Neural Analog Reinforcement Calculator 1951 by Marvin Minsky
SNARC model by Edwardo Martinez
Laser-cut frame, vacuum tubes, potentiometer, capacitor, acrylic on wood board
Designed by Marvin Minsky, the Stochastic Neural Analog Reinforcement Calculator (SNARC) is the first artificial neural network machine ever built. In 1949 Minsky began to seriously think about learning machines and how to design them. And in 1951 the stars aligned when funding, lab space and a colleague, Dean Edmonds, presented themselves and Minsky was able to turn his attention to making a physical version of a learning machine. Using analog and electromechanical components, 40 neurons were made and wired into a network, where each neuron was designed using a capacitor for short-term memory and a potentiometer (commonly found in volume controls) for long-term memory. Minsky and Edmonds tested its learning capabilities by having the machine navigate a virtual maze. When an action was taken that resulted in a positive reward, an electric clutch was used to engage a moving chain that turned the potentiometer. The combined network of potentiometer settings (analogous to weights in today's all-digital neural networks) were able to learn the actions to solve a maze.